
効率的に動く
ポイントAからポイントBまでエネルギーロスすることなく最大限に運動することを考えます詳しくはどうなっているのでしょうか?
歩行動作のような動き(ロコモーション)では「フットコンタクト(足の着地)」から次のステップへつながるエネルギーをポテンシャルエネルギーから弾性エネルギーとして発揮していきます
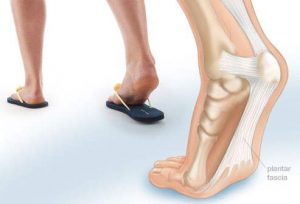
歩行ではヒールストライク(かかと着地)時には自重の100-150%のインパクトがかかり(走行では300-400%)プッシュオフ期には200-250%の弾性エネルギーで足のスウィングに繋げていきます。
「カタパルト・エフェクト」と呼ばれるこのコンセプトは例えばバスケット選手がスラムダンクをしたり三段跳び時に着地で得たエネルギーを倍にして着役力に繋げますがその秘密はMyoFascia(筋筋膜)にあります。
カタパルト・エフェクトをさらに理解するためにはMuscle Tuning Theoryを知っておくと役に立ちます。ヒールコンタクトで獲得したエネルギーを効率良く使うためには足、足首の安定性が必要になりヒールコンタクト時には足部の筋肉はアイソメトリック収縮をして関節の減速(背屈、距骨下関節の外反、脛骨内旋)を軟部組織の弾力性が行います。
ラバーバンドのようなローディングに加えて、十分なテンション(Fascial Tension)を十分に獲得しておく必要があります
インパクトをローディングするためには安定性を保つ必要があり、
Globalスタビリティを獲得する前にLocal Stabilityもまた必要になります。
(Local Reflexive Stability)
EBFAセミナーではFoot to Coreの安定性を獲得をスタートとしています、Local、Globalな安定性が確保することがダイナミックな運動につながり、これが効率的な運動や代償運動の予防となります。
関節の安定性、中心化を保ちながら筋肉など軟部組織が適切に機能することで獲得することができますが過去の運動パターンによって習慣化された軟部組織の粘弾性状態もトリートメントを通じて介入する必要があるかもしれません。
関節が適切に動くためには軟部組織の環境や関節の安定性など様々な要素が必要になってきます。